(原标题:车企扎堆入局“元宇宙”(二)——从智能体验视角分析)
2021年是元宇宙元年,虽然相关技术还处于前沿性探索阶段,但一些从事数字孪生的企业目前正在加紧布局元宇宙环境下的工业互联网和智能制造。
数字孪生的概念最初于2003年由Grieves教授基于产品生命周期管理视角提出的,英文为:Digital Twin,早期主要被应用在航空航天与军工领域等关键装备制造方面。如美国空军研究实验室、美国国家航空航天局(NASA)等,都基于数字孪生开展了飞行器质量管控应用,美国洛克希德·马丁公司也将数字孪生引入到F-35战斗机生产过程中,用于改进工艺流程,提高生产效率与质量。由于数字孪生具备虚实融合与实时交互、迭代运行与优化、以及全要素、全流程、全业务、数据驱动等特点,目前已被广泛应用到产品生命周期各个阶段,包括产品设计、制造、服务与运维等。
Grieves教授定义的物理对象、虚拟对象和连接对象的三维模型,是指导数字孪生的发展与应用主要模型,物理对象是一切可以被数字化观测和模型化描述的现实实体;虚拟对象则是将物理对象用几何、物理、行为和规则等模型描述和映射的虚拟实体;连接对象是完成物理对象到虚拟对象映射、虚拟对象操作物理对象的操作型对象。
元宇宙在基础模型定义上与数字孪生很像,特别是元宇宙也强调通过物理对象、虚拟对象以及两者之间的映射关系,实现虚实共生、共融的生态环境。这也使得在很多场景下无法区分两者关系。其实,元宇宙从诞生之日起就继承了娱乐基因,所以如果说数字孪生是以产品生产为中心,那元宇宙就是以用户消费体验为中心。元宇宙可将数字孪生模型从研发、生产阶段扩展到使用、消费阶段;从局部数字化车间扩展全面数字化生活空间。
元宇宙能够为汽车产业带来超越想象的潜力,驱动汽车制造创新和商业模式创新。元宇宙的三维沉浸式体验、人和社会关系数字化、物理和数字世界交汇、海量用户创作、数字资产价值显现等特征,将被逐渐应用到汽车的设计和智能制造中。
在上一篇《车企扎堆入局“元宇宙”(一)——从设计研发视角分析》中我重点介绍了元宇宙在汽车研发制造场景的应用,今天我将继续介绍元宇宙在车载智能系统和娱乐系统的应用前景。
一、元宇宙+智能系统
2020年11月2日,国务院办公厅正式印发 《新能源汽车产业发展规划 (2021-2035 年)》并明确指出汽车与能源、交通、信息通信等领域有关技术加速融合,电动化、互联网化、智能化已经成为汽车产业的发展潮流和趋势。在《智能网联汽车技术路线图 2.0》中也明确指出,到2025年,PA1、CA2级别的智能网联汽车销量需占总销量的50%以上,C-V2X3终端新车装配率达到50%,高度自动驾驶汽车实现限定区域和特定场景商业化应用。[7]
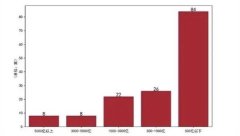
根据美国汽车工程师协会的划分标准,将智能汽车的发展分为手动驾驶、驾驶辅助、部分自动化、有条件自动化、高度自动化和完全自动化6个等级。例如:车身电子稳定系统 (Electronic stability program)ESP、制动防抱死系统(Antilock Brake System)ABS等,属于驾驶辅助级;定速巡航系统(Cruise Control System) CCS通过油门和刹车系统的组合控制构成部分自动化;自适应巡航控制(Adaptive Cruise Control)ACC、自动泊车系统(Automatic parking system)APK等,则由于仍然需要人工参与所以属于有条件自动化,特斯拉的完全自动驾驶(Full Self-Drive)FSD从实际使用效果看也只能算L3;目前上市的汽车中还没有达到L4级别的自动驾驶,L4级别的自动驾驶目前还在实验室,例如:百度和滴滴的项目;而L5级别的自动驾驶,即:完全没有驾驶员、全工况的的完全智能驾驶,还只在概念设计阶段,离上路还有不少差距。
汽车智能化发展阶段示意图
来源:智能汽车人机协同控制的研究现状与展望[9]
基于元宇宙的智能驾驶主要以L3-L4和L5为切入点,在L3-L4中主要以人机协同驾驶为中心,而在L5中则以汽车自主意识为中心。
1、智能环境感知
智能环境感知是实现全面自动化的前提,在目前的L4-L5的车辆设计中,通过安装在车身上的大量视觉、雷达、定位系统等外部传感器,感知现实世界中的物理对象,形成实时车辆决策环境数据。例如:特斯拉Autopilot系统,是由8个摄像头,12个超声波雷达和1个毫米波雷达构成,外部环境传感器为特斯拉驾驶员提供360度视觉宽度、250米的距离视野。
特斯拉Autopilot效果图
特斯拉Autopilot系统构成了智能驾驶的环境感知层,由于对传感器的可靠性和低延时要求非常高,只依靠车辆自身的传感器,感知外部环境数据,作出实时智能决策并不可靠。虽然特斯拉Autopilot系统自称是完全自动驾驶(FSD),但实际使用还需人工介入,其核心问题是对传感器的依赖程度非常高。例如:在位于中国西南部的雅安-西昌高速,即:北京-昆明高速公路(国家高速G5)四川段,地处大凉山复杂高山峡谷环境,虽然风景壮观,但受常年暴雨、大雾、泥石流、塌方、冰雪等复杂气候影响,事故风险高。在复杂气候条件下的叠加效应影响下,单靠车辆自身的环境感知系统是远远不能达到完全自动化驾驶水平的。
进入元宇宙时代,大量的路况、天气信息将被数字化构建为三维的路况空间,在虚拟环境中各种地理、天气、路况等外生变量将产生三维多元叠加效应,通过对这些叠加效应建模,实现在全天候,全路况下的数字道路环境分析和响应,元宇宙的数字路况空间将通过地域属性被同步到边缘云中。车辆可通过5G、6G通信网络将传感器感知的外部环境以低于毫秒级响应速度与边缘云交互,通过车辆自身环境与边缘云端的数字化环境进行路况修正、互为补充。边缘云和车辆自身传感器构成了完全自动化驾驶的双重数据保障,一旦车身传感器出现故障,边缘云将接管环境数据供给,为智能决策提供连续性数据支撑。
元宇宙的数字路况空间是由全民共同维护,公共交通机构、商业数据机构和每辆智能汽车将构成有下到上的路况物理对象扫描入网的数字路况运营框架。目前智能汽车出于成本考虑,安装的超声波雷达远多于毫米波雷达,在未来元宇宙数字路况中,智能汽车将大量安装具备3D扫描功能的摄像头、毫米波雷达和气候传感器,通过对路况三维实体数据的远距离感知,构建更加安全的数字路况数据。
2、虚拟数字空间构建
完全自动驾驶L5级别的定义是在不需要驾驶人员介入操控的情况下,通过车载电脑的感知和决策实现全天候、全地域的自动驾驶。L5级别要求车辆可应对环境气候及地理位置的动态变化,这个定义近乎趋近于需要无限克服目前地球上各种路况和气候条件,以及其综合叠加因素所产生的影响。车辆作为单一计算单元,仅依靠自身传感器和计算能力是无法构建这样一个多路况实时智能响应机制的。智能车辆和驾驶员一样需要通过大量实况数据积累、学习才能具备处理复杂路况的能力。
根据百度的Apollo智能交通白皮书对“车路智行”的技术发展路径来看,智能交通需要分别经历1.0数字化阶段,2.0网联化阶段,3.0完全自动化阶段。在百度ACE交通引擎架构中智能引擎部分是由Apollo自动驾驶系统和车路协同系统构成。而车路协同的是通过整合道路侧多元感知数据,依托云端边缘计算、深度学习,融合场景、动态高精地图、边云协同等满足未来交通自动驾驶车辆规模化应用的智能驾驶辅助系统。
智能交通发展阶段图
来源:Apollo智能交通白皮书[5]
元宇宙阶段的智能驾驶是全面实现L5阶段的完全自动化驾驶,其将在云端三维虚拟数字路况空间与车载智能决策系统的双重保障下完成全路况、全天候的自动驾驶。虚拟数字路况空间将由公共交通管理机构、商业智能交通运营机构以及每辆智能汽车共同参与对路况物理对象的扫描、构建、入网和运营。公共交通管理机构通过卫星遥感、卫星成像、3D测绘建立基础3D地图和气候等静态模型;商业智能交通运营机构通过实地勘察、动态3D扫描,毫米波雷达扫描建立第三视角路况动态模型;智能汽车通过自身携带的3D摄像头、毫米波雷达、微波雷达建立第一视角路况动态模型。
公共交通管理机构、商业智能交通运营机构以及每辆智能汽车将探测数据,通过车载5G/6G通信芯片实时上传至智能交通边缘云节点,边缘云节点实现虚拟数字路况空间的构建、维护和更新,并通过区块链网络实现边云数据协同,保障路况的交通、天气、事故、灾害等动态信息的实时、准确同步到每个节点,协助智能汽车的智能决策。
3、智能决策
2019年4月份,特斯拉在Autopilot HW3.0平台上发布了自研的FSD主控芯片,采用双芯片冗余设计,单芯片算力达到72TOPS,板卡总算力144TOPS。并实现了自动驾驶芯片+神经网络算法的垂直整合。基于神经网络算法的实时AI智能决策软硬件融合性设计成为未来智能汽车主流设计思路。但,目前在智能汽车的决策系统仍然存在两种不同的设计思路,一种以国内智能车企为代表的车身传感器+精确地图,边云协同的综合智能决策;一种是以特斯拉为代表的单依靠车身高清摄像头、毫米波雷达等高精度传感器实现仿人视觉决策系统。目前还不能断定哪种设计思路更具优势,但可以肯定的是如果在智能交通在数字路况空间上具备优势的条件下,第一种策略更具备安全性和可用性。
元宇宙环境下的智能汽车决策系统,是基于数字路况空间实现边云协同的综合智能决策系统。这是一种以车载智能决策系统为主、云端智能决策系统为辅,多人称视角的3D多维决策模型。元宇宙的数字路况空间建立的是一种第三人称视角的虚拟数字路况环境观测,即:“上帝视角”,可以更客观、全面、动态的显示交通、天气、事故、灾害的变化,可以更加穿透式的观察潜在路况风险。车载智能决策系统则是一种第一人称视角,对车辆行驶当前状态的现实观察,其利用车载视觉和雷达传感器,形成主观决策条件,以神经网络算法为决策算法模拟人类的视觉观察和判断,可以更快速的发现当前面对的路况风险。
路况风险分析本质上是一种非线性结构分析,车辆行驶风险往往难以预测,汽车行驶安全除了必须保障车辆自身的系统安全外,很大一部分还需实时监控路况的突发风险,并为此作出最佳决策。所以,智能决策除了车载智能决策系统的第一人称视角的主观分析外,还需要第三人称视角客观辅助分析。第一人称和第三人称3D视角,车载决策系统和云端决策系统构成元宇宙环境下汽车智能安全驾驶的决策双系统。
二、元宇宙+车载沉浸体验空间
全世界第一台安装车载收音机的汽车具体已经无法考证,不过按照雪佛兰和凯迪拉克自己的说法,在20世纪20年代,他们就已经在各自的车型上开始尝试安装车载收音机。第一台车载唱片机诞生于1956年一位克莱斯勒车主Peter Goldmark之手,他将一台7英寸的黑胶mini唱片机塞进了汽车的手套箱,从而点燃了车载播放器的革命。1960年第一台卡带立体声车载播放器被称为“疯子”的工程师及商人Earl Muntz打造完成,取名为:“Muntz Stereo-Pak”从此车主们终于可以听上了四声道立体声音乐。1987年,福特第一个将CD机完美的嵌入了林肯Town Car车型中,人们开始在车辆中感受数字音乐的魅力。进入2000年,随着MP3、MP4等多媒体播放器的兴起,人们正式进入车载娱乐系统时代。如今,超大显示屏幕、互联网接入、数字音乐、视频、电影、KTV等多元娱乐体验已经是新车上市的基本配置。
在2021年的蔚来日(NIO Day 2021),蔚来汽车展示了其与NREAL联合开发了专属的AR眼镜,眼镜全重76g,但可以投射出视距6米,等效201英寸的超大屏幕。同时还展示了与NOLO联合开发了NIO VR Glasses,可实现双目4K显示和毫秒级延时。利用AR/VR等元宇宙新技术,蔚来将打造了全景数字座舱“PanoCinema”。2022年Elon Musk 马斯克表示希望能将Steam 游戏平台直接搬到Tesla特斯拉车型上。
虽然,汽车作为交通工具,其安全运载功能一直占据设计的主导地位,但从未阻碍消费者不断追求汽车内部空间的舒适、惬意的驾乘体验。汽车拥有密闭的私人空间,这无疑是人们追求娱乐化的先决条件。无论是在车载收音机、卡带机、CD机、数字多媒体系统等时代,人们都尽量往这个私密空间塞入代表当时最新科技的娱乐体验设备。汽车智能化发展从L0的手动驾驶阶段到L5的完全自动化阶段,就是一个逐渐释放驾驶员,使乘员完全沉浸在自定义的空间体验区内,从而弱化汽车的运载功能,强化其办公、娱乐、运动等消费级功能的过程。
1、辅助驾驶体验空间提升智能汽车安全性
汽车的智能化发展在L0-L4阶段都是以辅助驾驶员,实现安全、高效的自动化驾驶为核心,从汽车驾驶室的设计发展看,为驾驶员提供视角直观、操作简单、信息全面的驾驶辅助系统,从而解决驾驶员在驾驶与休息切换过程中的安全性问题。从多功能方向盘到抬头显示系统(HeadUp Display HUD),都是尽量帮助驾驶员在不低头或转头的条件下操作车辆或查看路况信息,使驾驶员始终保持最佳行驶观察状态。
HUD 是将汽车行驶过程中仪表显示的重要信息投射到前风挡玻璃上,可使驾驶员不必低头就能看到仪表中的信息。其设计理念主要来自战斗机驾驶员的头盔显示系统。20世纪70年代南非空军的“幻影”F1AZ飞行员率先在实战中使用头盔瞄准具,实战中导弹引导头可根据飞行员的头部运动快速对准目标,实现大离轴角发射,不再需要飞行员努力机动把机鼻对准目标,实现空战意义上的“所见即所得”。
汽车的智能化发展进入L1阶段后,大量的辅助驾驶设备逐渐释放了驾驶员的脚与双手,使驾驶员不用再100%的全程操控汽车。但同时,也产生出兼顾司机休息与保持驾驶注意力难的新问题。2021年5月在美国加利福利亚,发生一起车祸,一辆特斯拉Model 3在一条高速公路上撞上了一辆卡车,导致卡车侧翻,特斯拉司机当场死亡。经过美国交通安全委员会调查发现,特斯拉的自动驾驶系统无法正确检测到卡车,驾驶员的注意力不足和特斯拉监控系统不成熟都是导致事故发生的原因。
从车辆安全行驶角度看,至少在完全自动化驾驶的L5阶段以前,保持驾驶员的驾驶注意力依然十分重要。基于元宇宙的驾驶体验,依然将车辆安全性放在第一位。利用抬头显示设备或智能眼镜显示系统,可以在司机视觉和听觉器官与道路之间,建立深度虚实融合的元宇宙安全辅助行驶体验空间。辅助驾驶体验空间在车辆辅助驾驶系统运行时,在司机的注意力聚焦区,呈现AR或MR的路况游戏,利用元宇宙的海量路况体验游戏的参与者,将司机的注意力牢牢聚焦在元宇宙安全辅助行驶体验空间内,对路况安全风险可以在毫秒级做出告警并刺激司机视觉和听觉神经,让司机在第一时间接管车辆控制权。元宇宙安全辅助行驶体验空间实现了安全驾驶意义上的“所见即所得”。
2、元宇宙实现车载软办公的沉浸式体验
在汽车上办公的想法主要来自“商务车”的问世,即:多功能汽车(Multi-Purpose Vehicles MPV)。1983年克莱斯勒公司推出的“Voyager”与“Caravan”车型是世界上最早的MPV,MPV的最大的特点是乘员多、乘坐空间大、舒适度高,可在家庭出行、商务接待等场景发挥作用。
根据统计,2020年北京平均单程通勤时间为47分钟,而上海则是42分钟,上班族一天平均有1个半小时在路途中度过。如何利用路途时间完成工作,就是车载办公系统需要考虑的功能。在2016年德国柏林消费电子展上,微软与梅赛德斯-奔驰联手推出“In Car Office”的项目,为客户的汽车变成一个移动工作站,帮助客户在车辆上轻松地完成与工作有关的任务,提高办公效率。在“In Car Office”中将除了将集成微软的Office办公软件以外,还包括会议工具、微信、Facebook(Mate)等工具。但无论像微软这样的第三方车载办公系统,还是车企原生的办公系统,近年来都呈现雷声大雨点小现状。主要原因是受限于目前汽车智能化水平暂时仍然停留在L2-L3阶段,驾驶人员无法完全解放;而另一个原因则是原有的办公设备的依然摆脱不了传统移动硬办公体验,即:手机、笔记本、Pad等,这些设备在汽车内部相对狭小且,稳定性不足的空间,无法产生直接效能激发车载办公的需求。
元宇宙将工作距离、办公空间、办公方式虚拟化为数字3D模式,配合全息成像、VR、AR、MR等新型成像技术,实现软办公的沉浸式体验。相较于传统手机、笔记本、Pad等移动硬办公体验,可在狭小的车内空间形成光学或数字化的可调视场,让乘员在1平方米的车载空间实现在100平方米的会议室体验;依靠数字化防抖技术,还能大大降低车身抖动带来的体验波动,使乘员始终保持全程工作沉浸体验。
3、车载沉浸式娱乐空间
从第一台车载mini黑胶唱机被塞进克莱斯勒后的70年里,人们没有终止过继续往汽车内加入各种娱乐设备,唱片机、卡带机、CD机、数字影音、KTV、游戏机等,只要属于那个时代最新的mini娱乐设备都会有人想到往车里安装。汽车作为一种工业产品,从诞生那天起,就被赋予了人类的价值观、生活形态、情感需求,同时也反映出不同时代、不同人群的审美取向,形成了汽车文化涵义。不过要说车载娱乐设备中最成功的,还当数能播放音乐的各类播放器。在汽车文化中音乐就是汽车的灵魂,没有音乐的汽车就是一台冰冷、毫无情感的工业产品。
但从工程技术角度分析,以音乐为核心的车载娱乐系统,历经70年来,经久不衰、日久弥新的原因,主要是音乐可以为汽车驾乘人员提供360度的沉浸式听觉体验,这是目前以显示器为主的视觉设备无法比拟的。车载娱乐中的沉浸式体验要求为驾乘人员提供身临其境、感官逼真的娱乐氛围,这应该包括:听觉、视觉乃至社交接触互动的体验。元宇宙是基于现实世界映射与交互的虚实共生世界,是具备多元感官系统的沉浸式数字生活空间。从科幻世界、游戏世界逐渐演化而来的元宇宙,天然具备娱乐化属性。虚实共生的数字娱乐将弱化狭小、噪音、震动和密闭等车内物理缺点,而通过数字空间放大乘员的观察范围和景深度,通过数字降噪优化听觉体验,通过全息360度视觉系统提升视觉体验,通过3D反馈触觉系统提升触觉体验。在基于元宇宙的车载娱乐空间内,无论游戏、社交、电影等娱乐活动都将享受零延迟、3D和包裹式的沉浸体验。
结语
虽然,目前元宇宙与汽车行业的主营业务还未发生直接化学反应,各大车商扎堆入局也仅限于品牌推广、展厅构建、销售等辅助业务,但出于对下一代数字世界的期望,未来必将有更多的车企加入元宇宙行列。而如何为元宇宙赋予生产力,为汽车赋予多维消费空间,为用户赋予虚实共生汽车生活,则需要业界很长一段时间的畅想、思考、设计、研发试错和实践,本文只是一个开始。
参考文献
- 工业和信息化部装备工业发展中心.《中国汽车产业发展年报2021》.
- 国务院办公厅. 新能源汽车产业发展规划(2021—2035年).http://www.gov.cn/zhengce/content/2020-11/02/content_5556716.htm
- 陶飞,刘蔚然,张萌,胡天亮,戚庆林,张贺,隋芳媛,王田,徐慧,黄祖广,马昕,张连超,程江峰,姚念奎,易旺民,朱恺真,张新生,孟凡军,金小辉,刘中兵,何立荣,程辉,周二专,李洋,吕倩,罗椅民.数字孪生五维模型及十大领域应用[J].计算机集成制造系统,2019,25(01):1-18.DOI:10.13196/j.cims.2019.01.001.
- Adamos Christou, Radu Chirila, and Ravinder Dahiya.seudo-Hologram with Aerohaptic Feedback for Interactive Volumetric Displays
- 百度.Apollo智能交通白皮书
- 本刊编辑部.美欧军工领域发力数字孪生技术应用[J].国防科技工业,2019(02):36-37.
- 李普超,丁首辰,薛冰.从汽车智能化发展到汽车行业“元宇宙”展望[J].内燃机与配件,2021(24):164-166.DOI:10.19475/j.cnki.issn1674-957x.2021.24.054.
- 麻晨,董方岐,胡成琳.数字孪生技术在汽车行业中的应用[J].信息技术与标准化,2021(11):23-27.
- 胡云峰,曲婷,刘俊,施竹清,朱冰,曹东璞,陈虹.智能汽车人机协同控制的研究现状与展望[J].自动化学报,2019,45(07):1261-1280.DOI:10.16383/j.aas.c180136.